
Expansion colossale de nano-composites à base de matériaux à transition de spin : vers le muscle artificiel
Le développement de muscles artificiels ou autres systèmes actionnables repose sur l’élaboration de matériaux à la fois souples et stimulables qui se déforment de façon réversible et contrôlée sous l’action d’un stimulus extérieur comme la température, la pression, l’humidité, une excitation électrique…Des scientifiques du LCC et du LAAS (CNRS) ont récemment mis au point de tels actionneurs souples à base de polymères dans lesquels ils ont dispersé des particules rigides à transition de spin qui s’allongent avec la température. Le choix de particules en forme d’aiguilles, dispersées et alignées dans la matrice souple, a permis d’obtenir une amplification exceptionnelle de la déformation dans le sens de l’alignement, supérieure à celle attendue pour le matériau actif pur. Ces résultats, publiés dans la revue Materials Horizons, ouvrent de nombreuses perspectives en robotique douce.
La robotique douce est un domaine de recherche en pleine croissance qui utilise des matériaux souples et flexibles capables de se tordre, se plier, se déformer, se déplacer ou adapter leur forme de manière à accomplir des tâches. Les applications sont nombreuses, notamment en médecine pour l’élaboration de muscles artificiels. Les matériaux les plus étudiés pour de tels actionneurs souples sont les élastomères diélectriques, les polymères conducteurs, les matériaux piézo/ferroélectriques, les fibres et fils de polymères enroulés ou torsadés, les matériaux à mémoire de forme etc. Selon le mécanisme physique sous-jacent, ils peuvent être actionnés par divers stimuli comme un champ électrique ou magnétique, la température, la pression, l’humidité ou une irradiation lumineuse. Chaque famille de matériaux présente ses avantages et ses inconvénients, mais le défi commun reste la nécessité de combiner des propriétés souvent opposées comme la puissance et la souplesse ou la précision et l’adaptabilité, défi qui nécessite en général d’élaborer des matériaux composites.
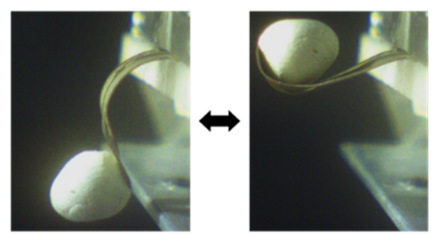
Dans ce contexte, des scientifiques du Laboratoire de chimie de coordination (CNRS) ont récemment élaboré des composites à base de polymères souples dans lesquels sont dispersées des particules rigides à transition de spin (TS). L’actionnement de ces particules repose sur un changement substantiel de volume avec la température, qui résulte de l’excitation des molécules qui les composent d’un état de spin bas vers un état de spin haut. Afin de canaliser cette déformation associée au phénomène de transition de spin dans une seule dimension pour en amplifier l’effet, les chercheurs ont synthétisé des particules à très fort rapport d'aspect en forme d’aiguilles qu’ils ont ensuite dispersées en les alignant dans la matrice polymère. Cette approche pionnière s'est avérée puissante et a permis d'obtenir des déformations exacerbées dans des matériaux composites contenant 25 % en masse d’aiguilles. Etonnamment, les déformations mesurées dans le sens de l’alignement des aiguilles sont supérieures à la déformation maximale réalisable dans le matériau actif pur. Cette amplification provient principalement des interactions élastiques entre les particules rigides et la matrice molle. La densité de travail élevée et le coefficient de dilatation thermique colossal qui en résultent font de ces matériaux composites d’excellents candidats pour des actionneurs souples. En collaboration avec des chercheurs du Laboratoire d’analyse et d’architecture des systèmes (CNRS), l'excellente contrôlabilité et durée de vie (plusieurs dizaines de milliers de cycles d'actionnement) de ces actionneurs a pu être démontrée.
Rédacteur: AVR
Référence
Colossal expansion and fast motion in spin-crossover@polymer actuators
Mario Piedrahita-Bello, José Elias Angulo Cervera, Alejandro Enriquez-Cabrera, Gábor Molnár, Bertrand Tondu, Lionel Salmon et Azzedine Bousseksou, Materials Horizons 12 octobre 2021.
DOI:10.1039/d1mh00966d